гардонандаи конвейер E
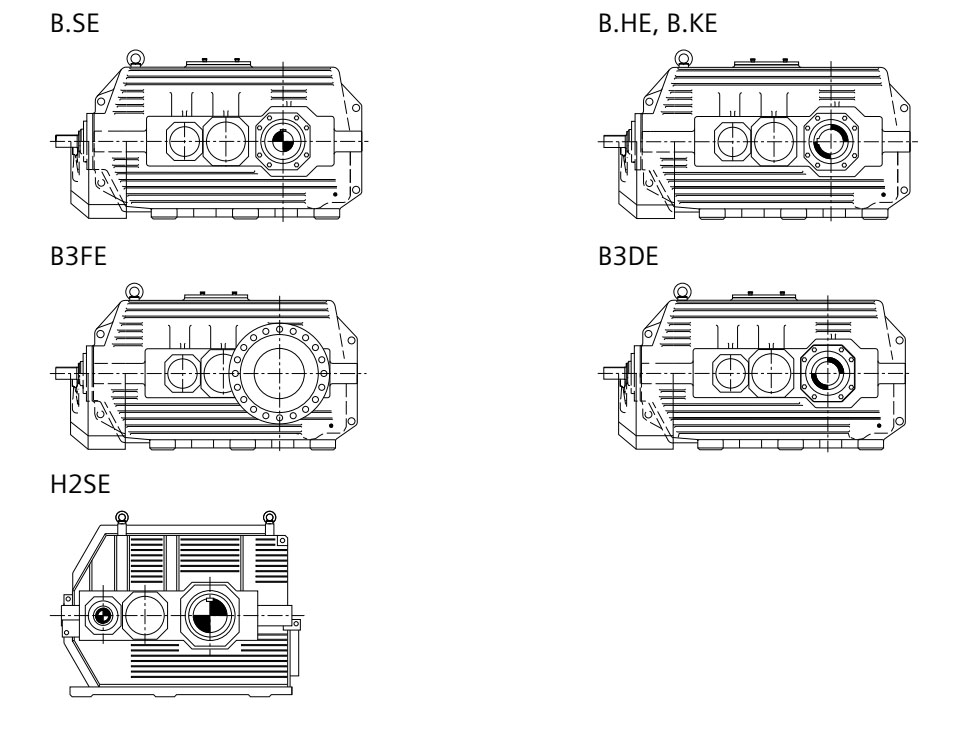
Андоза:
B3SE10 B3SE11 B3SE12 B3SE13 B3SE14 B3SE15 B3SE16 B3SE17 B3SE18 B3SE19
B3HE10 B3HE11 B3HE12 B3HE13 B3HE14 B3HE15 B3HE16 B3HE17 B3HE18 B3HE19
B3KE10 B3KE11 B3KE12 B3KE13 B3KE14 B3KE15 B3KE16 B3KE17 B3KE18 B3KE19
B3FE10 B3FE11 B3FE12 B3FE13 B3FE14 B3FE15 B3FE16 B3FE17 B3FE18 B3FE19
B3DE10 B3DE11 B3DE12 B3DE13 B3DE14 B3DE15 B3DE16 B3DE17 B3DE18 B3DE19
H2SE10 H2SE11 H2SE12 H2SE13 H2SE14 H2SE15 H2SE16 H2SE17 H2SE18 H2SE19
• Шароити васеъ ва натиҷаҳои кор
• Сардиҳои беруна вуҷуд надоранд
• кӯтоҳтар вақти расонидани
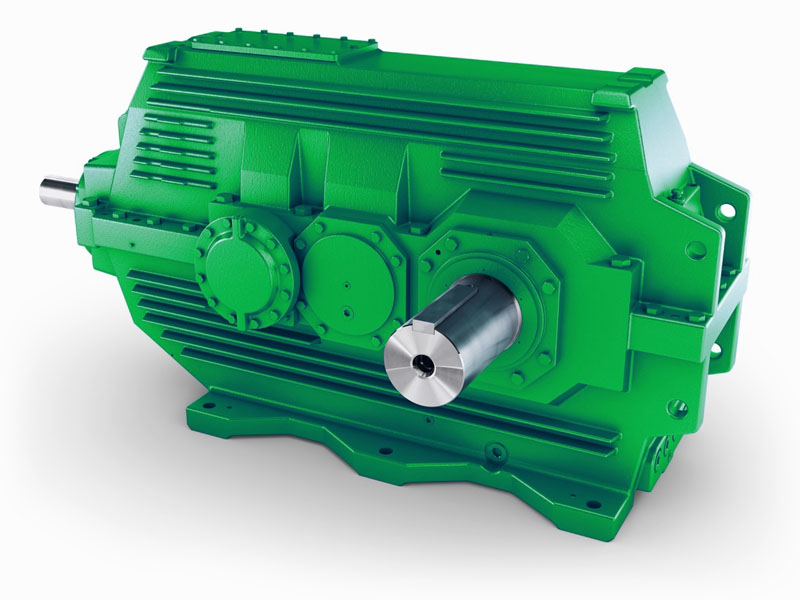
• Интихоби васеи 10 андоза бо вариантҳои ҷузъи кам
• Зичии баландтарини барқ
• Эътимоднокии баланд ва эътимоднокии амалиётӣ
• Бо шарофати мӯҳрҳои лабиринти бе тамоси асосан безарар ва безарар
• Милҳои баромади ҳалқапайванд имкон медиҳанд, ки васлкунии муҳаррики редуктор дар якҷоягӣ бо талабот ба фазои хурд имконпазир гардад
• Самаранокии баланд
• Хусусиятҳои барҷастаи садо ба шарофати фишангҳои хамворшудаи замин ва корпусҳои хомӯшкунандаи садо ва махсусан таносуби тамос бо дандонҳо
• IDS (Integrated Drive Systems) барои ҳамоҳангсозӣ ва назорати комил
Бозгашти лимити момент мавҷуд аст
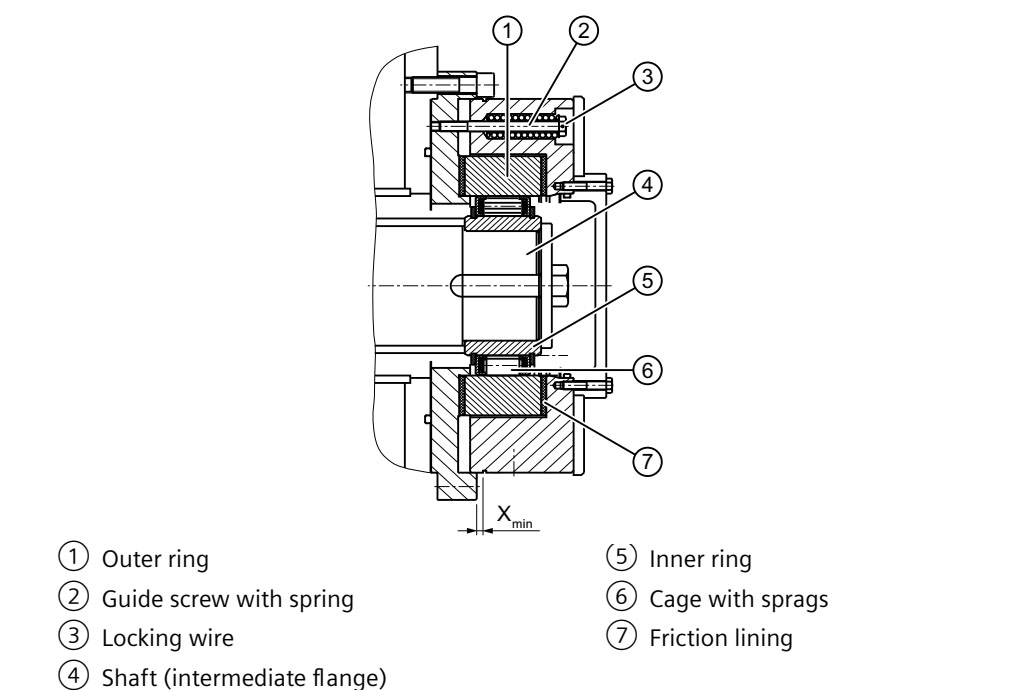
Дар шароити гарм хунук мемонад
Бо силсилаи гардонандаи камарбанди электронӣ, мо силсилаи фишангҳоро пешниҳод мекунем, ки дар шароити шадид муҳити зист дар хона аст. Барои кафолати ҳарорати мӯътадили кор, мухлисони хеле самаранок истифода мешаванд. Сарпӯшҳои махсуси тарҳрезишудаи ҳаво кафолат медиҳанд, ки ҳаво дар тамоми корпус баробар паҳн мешавад. Дар якҷоягӣ бо сатҳи оптимизатсияшуда беҳтарин тахассусҳо барои танзими барҷастаи гармӣ.
Системаҳои хунуккунӣ барои бисёр операторони минаҳо потенсиали иловагии хавфро ифода мекунанд, зеро аксар вақт таъминоти об мавҷуд нест. Як қисми ҳалли он дар сатҳи васеи манзил ҷойгир аст, қисми дуввум ва ҳалкунанда дар интиқоли интеллектуалии ҳаво, ки кафолат медиҳад, ки ҳавои атроф мустақиман аз болои манзил ва то ҳадди имкон роҳнамоӣ карда мешавад. Мо ба механикаи моеъҳои бо ин алоқаманд корҳои зиёди рушд сармоягузорӣ кардем.
Барои минтақаҳои махсуси татбиқ, як вентиляторе, ки новобаста аз самти гардиш амал мекунад, як кулоҳи сардкунандаи ҳавоии сардкунандаи аз ҷиҳати техникӣ оптимизатсияшуда мавҷуд аст. Ин имкон медиҳад, ки иқтидори гармӣ боз ҳам ба таври назаррас афзоиш ёбад.
Агрегатҳои фишанги B3SE дар 10 андозаи сохтмон мавҷуданд ва онҳоро метавон ҳамчун як диски сершумор барои замимаҳои гардонанда бо талабот ба нерӯи барқи баланд идора кард.
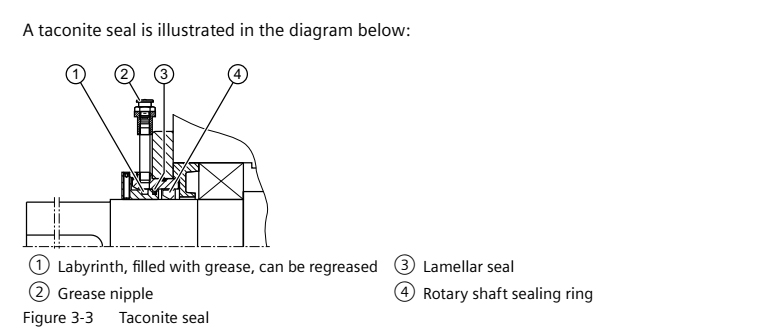
Мӯҳри таконит
Мӯҳри таконит аз ду унсури мӯҳр иборат аст:
• Ҳалқаи мӯҳри чоҳи гардишкунанда барои пешгирии фирори равғани молиданӣ
• Мӯҳри хокаи пур аз равған (иборат аз лабиринт ва мӯҳри ламелярӣ) барои кор фармудани
агрегати фишангдор дар мухити хеле чанголуд
Мӯҳри таконит барои истифода дар муҳити чанголуд беҳтарин аст
Системаи мониторинги сатҳи нафт
Вобаста аз мушаххасоти фармоиш, агрегати редуктор метавонад бо системаи мониторинги сатҳи равған дар асоси монитор, сатҳ ё тугмаи маҳдудияти сатҳи пуркунӣ муҷаҳҳаз карда шавад. Системаи мониторинги сатҳи равған тарҳрезӣ шудааст, то сатҳи равғанро ҳангоми хомӯш шудани агрегати редуктор пеш аз оғози кор санҷад.
Мониторинги подшипник (мониторинги ларзиш)
Вобаста аз мушаххасоти фармоиш, воҳиди фишангро бо сенсорҳои ларзиш муҷаҳҳаз кардан мумкин аст,
сенсорҳо ё бо риштаҳо барои пайваст кардани таҷҳизот барои назорат кардани подшипникҳои контактӣ ё фишанг. Шумо дар бораи тарҳи системаи мониторинги подшипникҳо дар варақаи ҷудогона дар ҳуҷҷатҳои пурраи агрегати редуктор маълумот хоҳед ёфт.
Ҳамчун алтернатива, пистонҳои ченкуниро ба агрегати фишангӣ пайваст кардан мумкин аст, то онро барои назорат омода кунанд